References
The following publications give further information on the interlock drive system.
|
Traction of Interlocking Spikes in a Granular Material
Volker Nannen and Damian Bover ASCE Earth and Space Conference 2022 doi: 10.1061/9780784484470.009 Keywords: extreme mobility, granular materials, vehicle-ground interaction, traction An empirical study of the tractive performance of different designs of the interlocking spikes on a granular material: dry and wet beach sand. |

|
|
Lateral Stability of Vehicle with Interlocking Spikes
Volker Nannen and Damian Bover ASCE Earth and Space Conference 2022 doi: 10.1061/9780784484470.031 Keywords: extreme mobility, lunar construction, vehicle stability An empirical study of the lateral stability of a vehicle that uses interlocking spikes for traction. We tested in two relevant environments: dumped material in a quarry and a wet beach sand. Tested slope angles ranged from 10° to 40°. |

|
|
Interlocking Spikes for Extreme Mobility
Volker Nannen and Damian Bover ASCE Earth and Space Conference 2021 - Engineering for Extreme Environments doi: 10.1061/9780784483374.049 Keywords: Interlock drive system, critical depth, tractive efficiency, pull/weight ratio A technical study of the forces that allow interlocking spikes to penetrate the soil reliably and efficiently. |

|
|
Integrated Sensing and Earthmoving Vehicle for Lunar Landing Pad Construction
Volker Nannen, Damian Bover, and Dieter Zöbel doi: ASCE Earth and Space Conference 2021 - Engineering for Extreme Environments doi: 10.1061/9780784483374.048 Keywords: Interlock drive system, lunar construction, tractive efficiency, pull/weight ratio, landing pads Requirement study of robot capabilities needed for lunar landing pad construction, and whether a bulldozer based on the interlock drive system can satisfy those requirements. |

|
|
Design, modelling and control of a novel agricultural robot with interlock drive system
David Reiser, Volker Nannen, Gero Hubel, Hans W. Griepentrog IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, 2019 doi: 10.1109/IROS40897.2019.8968449 And excellent study of how well the path of a push-pull robot with an interlock drive system can be controlled. The study shows that such a vehicle can turn on the spot. |

|
|
Reliability and Efficiency of Tractive Force Generation by the Interlock Drive System
Volker Nannen, Damian Bover, David Reiser, and Dieter Zöbel Sedewa, Technical Report 2019-02, 2019 DOI: 10.13140/RG.2.2.18059.85280 To better understand the interaction of a spike with the soil, we conducted a number of experiments where we controlled the draft force and measured the resulting motion of the spike as it penetrates the soil and interlocks with it. Results show that the interlock drive system can generate pull reliably even on wet soil, and that a pull/weight ratio of 2 and higher is possible. The tractive efficiency for a vehicle using the interlock drive system can reach a ratio as high as 0.96 for wet and 0.975 for dry soil, as calculated from the experimental results. Precise soil applications would benefit from a further improvement in the horizontal precision of soil penetration. Keywords: Interlock drive system, tractive efficiency, pull/weight ratio, precision agriculture |

|
|
Motion Study of Spike Entering the Soil of the Interlock Drive System
Volker Nannen, Damian Bover, David Reiser, and Dieter Zöbel 21st International Soil Tillage Research Organization (ISTRO) Conference, pp. 405–406, Paris, 2018 This contribution examines how the degree of soil compaction and the amount of soil moisture affect the efficiency of the spike and how the horizontal motion of a spike depends on soil conditions. The results show that tip of the spike follows a fairly diagonal trajectory at it penetrates the soil, with an angle that depends on soil surface condition and soil moisture. An important conclusion is that the interlock drive system can generate pull on wet soil, and that it penetrates wet soil more than twice as deep as dry soil for the same pull force, which is a factor when designing for the maximum penetration depth of a spike. Keywords: Interlock drive system, mobility, tractive effiency |

|
|
A Novel Traction Mechanism Based on Retractable Crampons to Minimize Soil Compaction and Reduce Energy Consumption
Nannen, V., Bover, D. and Zöbel, D. Sedewa, Technical Report 2017-03, 2017 DOI: 10.13140/RG.2.2.29803.95523/2 Tired and tracked tractors on agricultural soil have the inherent limitation of needing considerable ballast to gain traction and have low tractive efficiency due to slip and tire flexing. These limitations contribute to soil degradation and greatly reduce the possibility to intensify mechanical field management. To address these disadvantages, we introduce a novel traction mechanism which combines inching or push-pull locomotion with retractable tines or crampons which penetrate the soil every few meters. Once inserted into the soil, relatively thin and short crampons provide sufficient motion resistance to pull tillage implements through the soil, without the need for additional ballast. Keywords: Push-pull locomotion, inching locomotion, soil compaction, travel reduction, tractive efficiency |

|
|
UTOPUS Traction Technology: A New Method for Planetary Exploration of Steep and Difficult Terrain Nannen, V., Bover, D., Zöbel, D., Parma, F., Marascio, K. and McKenzie, B.M., 2016. UTOPUS Traction Technology: A New Method for Planetary Exploration of Steep and Difficult Terrain. 8th ISTVS Americas Regional Conference, Detroit, MI After several successful missions to explore the surface of Mars with wheel-based rovers, the exploration of difficult and steep terrain has gained prominence in the field of planetary exploration, calling for new methods of vehicle locomotion which offer stability in steep and difficult terrain. UTOPUS traction technology offers a new method of locomotion which abandons the wheel paradigm for a two-phased anchoring and de-anchoring technique by driving articulated spikes into the ground. In agriculture it minimizes soil compaction, reduces energy consumption, and produces a draft force similar to much heavier wheel-based tractors. Here we investigate whether the inherent stability of locomotion based on articulated spikes allows exploration of steep and difficult terrain. We present experimental results from climbing and descending a mound of heterogeneous dust, sand, and granular material at the critical angle of repose, at an inclination of 25–40 degrees. The UTOPUS vehicle repeatedly climbed and descended the mound safely. An initial problem when reaching the top of the mound was solved by rebalancing the vehicle. Occasional failure occurred when the vehicle had strong lateral inclination, or on patches of very loose ground, suggesting the need for some design changes to the current model. Keywords: inching locomotion, push-pull locomotion, planetary exploration, steep terrain exploration |

|
|
UTOPUS: A Novel Traction Mechanism to Minimize Soil Compaction and Reduce Energy Consumption
Nannen, V., Bover, D., Zöbel, D., McKenzie, B.M. and Ben Avraham, M. ISTVS 8th Americas Regional Conference, Detroit, MI, 2016 Tractor tires on agricultural soil suffer from inherent limitations like energy loss due to slip and tire flexing and a need for considerable ballast to gain traction. These limitations contribute to soil compaction, make the agricultural tractor energy-inefficient and make it unviable to power a tractor with solar panels or by storing renewable energy in batteries. To address these disadvantages as a whole, we introduce a novel traction mechanism that allows weeding and cultivation using only autarkic solar energy, based on the novel principle of retractable tines or spikdes for traction. The mechanism inserts relatively small spikdes every few meters into the soil, and then uses a push-pull mechanism to pull tillage implements through the soil, without any additional ballast. The light weight of the resulting machine and the small contact area of spikes with the soil reduce soil compaction, while the static nature of the spikdes minimizes energy loss and increases energy efficiency. We report a range of successful proof-of-concept trials which show the practical feasibility of the basic concept for weeding and soil cultivation with solar energy, wind energy, and electric power supply under different conditions. We also provide calculations on the economic advantages compared to ballasted tires. Keywords: Push-Pull Locomotion, Inching Locomotion, Energy Efficiency, Tractive Efficiency, Soil Compaction |

|
|
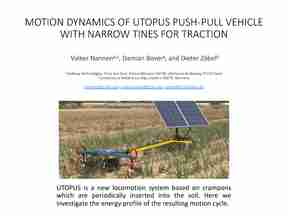
Motion Dynamics of UTOPUS Push-Pull Vehicle with Narrow Tines for Traction
Volker Nannen, Damian Bover, and Dieter Zöbel ISTVS 8th Americas Conference, Detroit, Michigan, 2016 It has been shown that a locomotion system based on narrow tines which are periodically inserted into the soil can generate considerable traction power on loose soil, promising new opportunities for efficient and sustainable agricultural machines. However, the resulting vehicle dynamics are different from wheeled or tracked locomotion and require a new conceptual approach in order to arrive at efficient engineering solutions. To better understand the resulting dynamics, we present a detailed description of recent experiments on the locomotive dynamics. Using a variable frequency drive and electric motor which drives a push-pull mechanism connected to two alternating frames with narrow tines and plow shares, we investigate the energy characteristics of the resulting device, and measure power consumption over the resulting motion cycles. We find that the concepts of inserting tines into the soil, and then pulling from them, cannot be treated as separate phases of the motion cycle but must be viewed as a single process, such that the way the tines settle in the soil affects the motion dynamics and energy consumption of the vehicle during the pulling phase. This needs to be taken into account for low level motion control, and calls for special mounts for tools like plow shares to optimize interaction with the soil. Keywords: vehicle dynamics, push-pull locomotion, narrow tines, tractive efficiency |
|
|
Apparatus and Method to Determine Ground Properties by Traction Anchors and Sensors
Damian Bover, Volker Nannen, and Georgina Ramirez US Patent, filed 2015: 9,945,832 A system and apparatus for determining soil properties and managing the ground can include a platform equipped with traction anchors, wherein at least one anchor is configured to provide a point of traction on the ground and to pull the platform. The system also includes one or more sensors positioned and configured to detect ground properties near the anchor, and a computer subsystem configured to receive and process data on ground properties measured by the sensor, to process this information, and capable of transmitting information about the ground soil to a remote receiver. |
|
|
Technical Background to the Autonomous Self-Actuated Tillage Implement
Volker Nannen, Damian Bover Sedewa, Technical Report 2013-08, 2013 DOI: 10.13140/RG.2.2.19137.61288 Originally filed as applicant arguments in support of the patent application for Autonomous Self-Actuated Tillage Implement. See USPTO, Public Pair. Enter Patent number 9,144,188 and go to Image File Wrapper. Filed on Aug 5, 2013 |

|
|
Autonomous Self-Actuated Tillage Implement
Damian Bover Spanish Patent, published 2011: ES2351140 PCT, published 2012: WO2012010722 US Patent, published 2013: 9,144,188. An implement has at least a first plow share in front, provided with an anti-rollback mechanism, and at least a second plow share in the rear, with another anti-rollback mechanism. The plow shares are interconnected by alternate approaching and distancing mechanisms. A telematic control unit based on a computer system that is assisted by a global positioning system, autonomously guides movement of the implement. A steering system formed by an oscillating support can rotate in a plane perpendicular to the advancement direction of the implement and lifts one of the plow shares in relation to the ground and moves it laterally. A power supply system using renewable energy or internal or external combustion engines is mounted on the implement. |
|